Что такое бесколлекторный двигатель постоянного тока, как он устроен и работает
Содержание:
- Отличия коллекторного и бесколлекторного двигателя
- Схема подключения
- Плюсы бесколлекторных моторов
- FAQ[править]
- Трёхфазный бесколлекторный электродвигатель постоянного тока
- Пошаговая инструкция перемотки электродвигателя своими руками
- Как работает бесщеточный двигатель
- Принцип работы бесколлекторного мотора
- Как выбрать двигатель для квадрокоптера
- Основные параметры электродвигателя
- Тестирование работы схемы
- Коллекторные двигатели разной мощности
- Звони: +7-908-918-03-57
Отличия коллекторного и бесколлекторного двигателя
Привод коллекторного типа отличается от БД как конструктивными особенностями (см. рис 5.), так и принципом работы.
Рис. 5. А – коллекторный двигатель, В – бесколлекторный
Рассмотрим конструктивные отличия. Из рисунка 5 видно, что ротор (1 на рис. 5) двигателя коллекторного типа, в отличие от бесколлекторного, имеет катушки, у которых простая схема намотки, а постоянные магниты (как правило, два) установлены на статоре (2 на рис. 5). Помимо этого на валу установлен коллектор, к которому подключаются щетки, подающие напряжение на обмотки якоря.
Кратко расскажем о принципе работы коллекторных машин. Когда на одну из катушек подается напряжение, происходит ее возбуждение, и образуется магнитное поле. Оно вступает во взаимодействие с постоянными магнитами, это заставляет проворачиваться якорь и размещенный на нем коллектор. В результате питание подается на другую обмотку и цикл повторяется.
Частота вращения якоря такой конструкции напрямую зависит от интенсивности магнитного поля, которое, в свою очередь, прямо пропорционально напряжению. То есть, чтобы увеличить или уменьшить обороты, достаточно повысить или снизить уровень питания. А для реверса необходимо переключить полярность. Такой способ управления не требует специального контролера, поскольку регулятор хода можно сделать на базе переменного резистора, а обычный переключатель будет работать как инвертор.
Конструктивные особенности двигателей бесколлекторного типа мы рассматривали в предыдущем разделе. Как вы помните, их подключение требует наличия специального контролера, без которого они просто не будут работать. По этой же причине эти двигатели не могут использоваться как генератор.
Стоит также отметить, что в некоторых приводах данного типа для более эффективного управления отслеживаются положения ротора при помощи датчиков Холла. Это существенно улучшает характеристики бесколлекторных двигателей, но приводит к удорожанию и так недешевой конструкции.
Схема подключения
Как было сказано выше, для работы бесколлекторного двигателя нужен специальный контроллер. На алиэкспресс можно найти как комплекты из двигателя и контроллера, так и по отдельности. Контроллер также называют ESC Motor или Electric Speed Controller. Выбирают их по силе тока, отдаваемого в нагрузку.
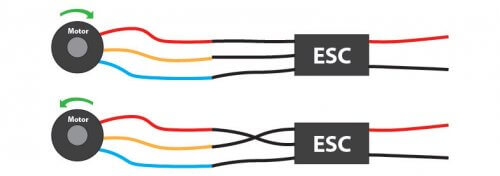
Обычно подключение электродвигателя к контроллеру не вызывает затруднений и понятно даже для чайников. Главное, что нужно знать — для смены направления вращения нужно изменить подключение любых двух фаз, собственно также, как и в трёхфазных асинхронных или синхронных электродвигателях.
В сети есть и ряд технических решений и схем как сложных, так и для чайников, которые вы можете увидеть ниже.
В этом видеоролике автор рассказывает, как подружить БК моторчик с «ардуиной».
А в этом ролике вы узнаете о различных способах подключения к разным регуляторам и как его можно сделать своими руками. Автор демонстрирует это на примере моторчика от HDD, и пары мощных экземпляров — inrunner и outrunner.
Кстати схему из видео для повторения также прикладываем:
Плюсы бесколлекторных моторов
Почти нет изнашиваемых деталей. Почему «почти», потому что вал ротора устанавливается на подшипники, которые в свою очередь имеют свойство изнашиваться, но ресурс у них крайне велик, да и взаимозаменяемость их очень проста. Такие моторы очень надежны и эффективны. Устанавливается датчик контроля положения ротора. На коллекторных моторах работа щеток всегда сопровождается искрением, что впоследствии вызывает помехи в работе радиоаппаратуры. Так вот у бесколлектоных, как вы уже поняли, эти проблемы исключены. Нет трения, нет перегрева, что так же является существенным преимуществом. По сравнению с коллекторными моторами не требуют дополнительного обслуживания в процессе эксплуатации.
FAQ[править]
Мотор крутится не в ту сторонуправить
Чтобы поменять направление вращения бесколлекторного мотора, достаточно поменять местами подключение любых двух из трёх проводов (которые идут к мотору).
Могут ли моторы CW/CCW вращаться в другую сторонуправить
На моторах для мультикоптеров часто есть обозначение направления вращения CW/CCW. Они могут вполне вращаться и в обратную, не предназначенную для них сторону, если поменять местами 2 провода подключения (если в моторе нет встроенного регулятора). Мотор не сломается и его ресурс не уменьшится.
Следует иметь в виду, что обозначения CW/CCW ставятся в соответствии с крепежом пропеллера: направлением резьбы для затяжки пропеллера. То есть если мотор будет крутиться в обратном для него направлении, то возможно самооткручивание гайки и отстрел пропеллера. В таком случае следует применять самозатягивающиеся (нейлоновые) крепления.
Бесколлекторный мотор плохо стартуетправить
Мотор плохо стартует, то есть начинает вращаться, а потом останавливается…
- Большинство причин кроется в больших скачках тока и, как следствие, провалах питающего напряжения. В первую очередь проверьте провода до аккумулятора. Пробную проверку лучше производить на той длине проводов, которые даны изготовителем, или короче.
- Попробуйте снять нагрузку с мотора и проверить его на холостом ходу. Если так всё в порядке, а при установке пропеллера возникают проблемы, только дергается в одном направлении, попробуйте поставить мягкий старт или увеличить время акселерации. Также здесь поможет установка плавного выключения мотора.
- Контроллеры, у которых есть ограничение тока, всегда имеют индикацию этого режима — это поможет установить, произошло срабатывание токовой защиты или нет.
Чем и как смазывать подшипникиправить
- Смазывать надо «быстроходными» маслами, т. е. жидкими. Нижний минимум по вязкости — трансмиссионное масло для мотоциклетных коробок. А лучше купить обычную «веретёнку». Купите один пузырёк, и закроете вопрос на несколько лет.
- Если подшипник разбирать, то внутрь зубочисткой «шрус 4» и пару капель синтетической трансмиссионки. Аккуратно собрать, протереть и прокрутить — всё само перемешается.
- Если подшипник не разбирать, то один из лучших методов смазки — это создать вакуум с помощью шприца. Внутрь шприца налить синтетику для трансмиссии, поместить туда подшипники, и поршень — на разряжение.
- Как это делалось в недалёкую бытность, на большинстве автобаз, ремонтных мастерских и т.д. (способ наших дедов): маленькая ёмкость, смазка, подшипник, и на огонь. Когда сильно нагрелось, снимаем и остужаем. Воздух при нагреве выходит, а при остывании засасывает смазку пока она тёплая и не очень вязкая. Конечно, раньше не было силиконов и других крутых смазок, но наши предки таким образом даже густые смазки в подшипники загоняли.
- При потенциальной опасности попадания воды на/в моторы (полёты вблизи или над водоёмами) полезно заменить все подшипники в моторах на нержавеющие. Иначе от малейшего контакта с (особенно — морской) водой (и даже без контакта) подшипники может заклинить. Ещё более радикальное средство – подшипники с шариками из двуокиси циркония, но стоят дорого.
Моторы загрязнилисьправить
Для чистки моторов от грязи (например, после падения) понадобится разборка, маленькая кисточка с жёстким ворсом (зубочистка) и сжатый воздух. Необходимо избежать попадания жидкостей в подшипники, не только воды или спирта, но и органических растворителей типа WD-40 или бензина, иначе подшипникам быстро выйдут из строя: кроме ржавчины и вымывания смазки могут быть микрогидроудары и кавитация при вращении шариков по влажной обойме.
Как измерять температуру мотораправить
Считается, что температура мотора не должна превышать 80°С. Температуру следует измерять в процессе работы мотора, т.к. он обдувается проходящими массами воздуха от пропеллера, если он полностью не закрыт. Примерно 30° температуры мотор обычно сразу добирает в течении 10 секунд после остановки при работе на максимальной мощности. Проверено инфракрасным датчиком температуры.
Многожильный или одножильный провод намоткиправить
При прочих равных многожильный провод обеспечивает лучшее заполнение окна, в то время как одножильный гораздо лучше держит перегрузки за счёт лучшего охлаждения.
- Если говорить о снятии каких-либо рекордных ТТХ, то лучше многожильный провод намотки, например, как у T-Motor.
- Если просто летать каждый день, то лучше одножильный, так как он живучее к перегреву и крашам.
Трёхфазный бесколлекторный электродвигатель постоянного тока
Большинство БД выполняются в трехфазном исполнении. Для управления таким приводом в контролере имеется преобразователь постоянного напряжения в трехфазное импульсное (см. рис.7).
Чтобы объяснить, как работает такой вентильный двигатель, следует вместе с рисунком 7 рассматривать рисунок 4, где поочередно изображены все этапы работы привода. Распишем их:
- На катушки «А» подается положительный импульс, в то время как на «В» — отрицательный, в результате якорь сдвинется. Датчиками зафиксируется его движение и подастся сигнал для следующей коммутации.
- Катушки «А» отключается, и положительный импульс идет на «С» («В» остается без изменения), далее подается сигнал на следующий набор импульсов.
- На «С» — положительный, «А» — отрицательный.
- Работает пара «В» и «А», на которые поступают положительный и отрицательный импульсы.
- Положительный импульс повторно подается на «В», и отрицательный на «С».
- Включаются катушки «А» (подается +) и повторяется отрицательный импульс на «С». Далее цикл повторяется.
В кажущейся простоте управления есть масса сложностей. Нужно не только отслеживать положение якоря, чтобы произвести следующую серию импульсов, а и управлять частотой вращения, регулируя ток в катушках. Помимо этого следует выбрать наиболее оптимальные параметры для разгона и торможения. Стоит также не забывать, что контроллер должен быть оснащен блоком, позволяющим управлять его работой. Внешний вид такого многофункционального устройства можно увидеть на рисунке 8.
Пошаговая инструкция перемотки электродвигателя своими руками
Последние универсальные, работают как от постоянного, так и от переменного тока. Они сохраняют популярность, даже несмотря на то, что наличие щёток отрицательный момент, так как щётки стираются и искрят. За этим узлом требуется постоянное наблюдение, техническое обслуживание. К плюсам коллекторных двигателей относят возможность плавной регулировки скорости в широких пределах, невысокую стоимость.
Первые, делятся на два подвида, в зависимости от организации индуктора он может быть на постоянных магнитах или специальных катушках возбуждения. Они служат для создания магнитного потока, необходимого для образования вращательного момента.
Для получения во внешней цепи постоянных по направлению э. д. с, напряжения и тока в простейшем генераторе виток присоединяют не к двум кольцам, как показано на рис. 70, а к одному кольцу, разрезанному на две изолированные одна от другой части. Начало витка присоединяют к одной половине кольца, конец—к другой (рис. 71).
Таким образом, при замене двух контактных колец двумя изолированными одна от другой коллекторными пластинами происходит выпрямление напряжения и, действующего между щетками А и Б, а следовательно, и тока i во внешней цепи. Характер изменения напряжения и на щетках и тока i поясняется на рис. 71,д. Напряжение и ток получаются постоянными по направлению, но переменными по значению.
Коллекторные двигатели постоянного тока с постоянными магнитами (КДПТ ПМ) обычно используются в задачах не требующих больших мощностей. КДПТ ПМ дешевле в производстве, чем коллекторные двигатели с обмотками возбуждения.
Коллекторный двигатель постоянного тока (КДПТ) с постоянными магнитами является наиболее распространенным среди КДПТ. Индуктор этого двигателя включает постоянные магниты, которые создают магнитное поле статора.
При увеличении тока якоря, ток индуктора (обмотки возбуждения) уменьшается, в результате чего уменьшается поле индуктора, что приводит к уменьшению скорости двигателя, и увеличению момента.
Как работает бесщеточный двигатель
В 1970-х годах произошел скачок в сфере полупроводниковой электроники, благодаря которому было решено устранить коллектор и щетки в двигателях постоянного тока. В бесщеточном двигателе усилитель заменил собой механические соединения контактов. Электронный датчик понимает угол поворота ротора и способен контролировать полупроводниковые переключатели. Отказ от скользящих контактов привел к снижению трения в механизме, а значит, и увеличению срока службы.
Бесщеточный двигатель в шуруповерте гораздо эффективнее и меньше страдает от износа. Также он гораздо тише и обеспечивает высокий крутящий момент. Внутренние элементы полностью закрываются, благодаря чему грязь и вода не попадают внутрь. Эффективность преобразования энергии в силу позволяет получить высокий КПД.
На скорость вращение влияет не центробежная сила, а напряжение, потому двигатель может работать в заданном режиме без перебоев. Если ток начнет просачиваться или мотор намагнитится – производительность не пострадает, а скорость не отстанет от момента вращения.
При эксплуатации механизма нет нужны в использовании коммутатора и обмотки, а магнит гораздо меньше, как по массе, так и по габаритам, если сравнивать с щеточным конкурентом.
Такое решение применяется в шуруповертах, мощность которых не переходит за 5 кВт. Их неразумно устанавливать в моделях с большими параметрами. Магниты внутри корпуса чувствительны к магнитному полю и сильному нагреву.
Разница щеточного и бесщеточного шуруповерта в принципе работы двигателя:
- Ток переключается не в роторе, а в обмотках статора. На якоре не достает катушки, магнитное поле образуется благодаря специальным магнитам внутри корпуса.
- Миг, когда требуется подача электричества, определяется встроенными датчиками. Они работают по принципу эффекта Холла. ДПР импульсы и регуляторные сигналы скорости проходят через встроенный процессор, где и формируются. Это называется ШИМ сигналом.
- Образованные импульсы в порядке друг за другом направляются на инверторы или, если проще, усилители – они увеличивают полученный ток. Их выходы связаны с обмоткой на статоре. Инверторы необходимы для коммутирования тока, возникающего в катушках, следуя импульсам, которые подаются из узла внутреннего процессора.
В результате описанного процесса формируется магнитное поле, которое связывается с тем, что вокруг ротора. Якорь начинает вращение – инструмент работает.
Принцип работы бесколлекторного мотора
Здесь все наоборот, у моторов бесколлекторного типа отсутствуют как щетки так и коллектор. Магниты в них располагаются строго вокруг вала и выполняют функцию ротора. Обмотки, которые имеют уже несколько магнитных полюсов, размещаются вокруг него. На роторе бесколлектоных моторов устанавливается так называемый сенсор (датчик) который будет контролировать его положение и передавать эту информацию процессору который работает в купе с регулятором скорости вращения (обмен данными о положении ротора происходит более 100 раз в секунду). На выходе мы получаем более плавную работу самого мотора с максимальной отдачей.

Бесколлекторные моторы могут быть с датчиком (сенсором) и без него. Отсутствие датчика незначительно снижает эффективность работы мотора, поэтому их отсутствие вряд ли расстроит новичка, но зато, приятно удивит ценник. Отличить друг от друга их просто. У моторов с датчиком, помимо 3-х толстых проводов питания есть еще дополнительный шлейф из тонких, которые идут к регулятору скорости. Не стоит гнаться за моторами с датчиком как новичку так и любителю, т.к их потенциал оценит только профи, а остальные просто переплатят, причем значительно.
Как выбрать двигатель для квадрокоптера
Итак, теперь вы знаете основы работы и из чего он состоит, теперь узнаем, как выбрать мотор для дрона.
Размер двигателя
 Первое, что вы должны выбрать, это размер двигателя, который вы будете использовать. К счастью, большинство производителей в нашем хобби установили стандартную схему именования своих двигателей. Обычно это 4-значное число, которое выглядит примерно как «2205». Первые две цифры этого числа — это диаметр (в мм) статора, а второй — это высота (также в мм). В общем, чем больше из этих чисел, тем больше мощности двигатель может обрабатывать и чем больше крутящего момента он будет генерировать. Однако нюанс заключается в том, что большие цифры означают более тяжелый двигатель — в основном благодаря тому, что он просто «больше».
Первое, что вы должны выбрать, это размер двигателя, который вы будете использовать. К счастью, большинство производителей в нашем хобби установили стандартную схему именования своих двигателей. Обычно это 4-значное число, которое выглядит примерно как «2205». Первые две цифры этого числа — это диаметр (в мм) статора, а второй — это высота (также в мм). В общем, чем больше из этих чисел, тем больше мощности двигатель может обрабатывать и чем больше крутящего момента он будет генерировать. Однако нюанс заключается в том, что большие цифры означают более тяжелый двигатель — в основном благодаря тому, что он просто «больше».
Вот общие размеры двигателей для квадрокоптеров:
- 1806 – используются в минидронах, на них ставятся 3-х или 4-х дюймовые пропеллеры.
- 2204 – Одни из самых популярных двигателей в течение долгого времени. На них ставят 5-и дюймовые пропеллеры. 2204 начали терять популярность в 2015 году и сейчас почти не используются.
- 2205 – самые популярные моторы, на них можно ставить 5-и дюймовые трехлопастные пропеллеры.
- 2206 – набирающая популярность модель двигателей, имеет немного большие габариты за счет увеличения мощности на 15% в сравнении с 2205.
- 2207 / 2407 – Еще более мощные двигатели, гонка мощностей я бы сказал. По характеристикам, они могут выдавать тягу на 50% больше, чем 2205. Используются редко и еще не популярны.
RPM константа (kV)
Все моторые имеют рейтинг Kv. Этот рейтинг показывает то, насколько быстро будут крутиться ваши пропеллеры. Максимальное количество оборотов в минуту, которое сможет выдать ваш мотор, можно узнать, если умножить kV на напряжение аккумулятора. Так, если у вас двигатель 2300kV и батарея lipo 4s, то будет такая формула, так как у 4s lipo напряжение 14.8 вольт:
Но не стоит брать эту цифру как фактическое значение, которое будет развивать мотор, лучше использовать эту цифру как справочное число для ориентира — на что будет способен квадрокоптер на этих двигателях. Общая информация, какие пропеллеры нужно ставить на двигатели 2204 и 2205:
- 4-х дюймовые пропеллеры для двигателя 2600kV или с большим kV.
- 5-х дюймовые пропеллеры для двигателя 2300-2600kV моторы.
- 6-х дюймовые пропеллеры для двигателя 2300kV или с более меньшим kV.
Обратите внимание, что это не жесткие правила, а лишь рекомендации, но если вы будете придерживаться их, то ваш дрон будет летать с наилучшими характеристиками. Вес Единственное, что нужно помнить про вес, это то, что каждый сэкономленный грамм нужно умножать на 4 (или больше, смотря какой дрон будете собирать)
Тяжелые моторы обычно довольно мощные и компенсируют свой вес тягой
Вес Единственное, что нужно помнить про вес, это то, что каждый сэкономленный грамм нужно умножать на 4 (или больше, смотря какой дрон будете собирать). Тяжелые моторы обычно довольно мощные и компенсируют свой вес тягой.
Цена Цена одно из важных значений, чем выше цена, тем качественнее компоненты и сборка, а значит и результаты по скоростям и маневренности. В среднем цены от 600 до 2 000 рублей.
Вал Вал должен быть достаточно длинным, но не менее 13 мм в длину и 5мм в диаметре. 5мм это самый распростроненный диаметр у пропеллеров, в противном случае вам придется рассверливать или покупать новые проппы, так как они или не налезут или будут маленькие. А насчет длины — нужно не забывать, что пропеллеры закрепляются контргайками, а она должна полностью пройти вал по резьбе.
Основные параметры электродвигателя
Момент электродвигателя
Вращающий момент (синонимы: вращательный момент, крутящий момент, момент силы) – векторная физическая величина, равная произведению радиус вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы.
,
- где M – вращающий момент, Нм,
- F – сила, Н,
- r – радиус-вектор, м
Справка: Номинальный вращающий момент Мном, Нм, определяют по формуле
,
- где Pном – номинальная мощность двигателя, Вт,
- nном – номинальная частота вращения, мин-1
Начальный пусковой момент – момент электродвигателя при пуске.
Справка: В английской системе мер сила измеряется в унция-сила (oz, ozf, ounce-force) или фунт-сила (lb, lbf, pound-force)
1 oz = 1/16 lb = 0,2780139 N (Н)1 lb = 4,448222 N (Н)
момент измеряется в унция-сила на дюйм (oz∙in) или фунт-сила на дюйм (lb∙in)
1 oz∙in = 0,007062 Nm (Нм)1 lb∙in = 0,112985 Nm (Нм)
Мощность электродвигателя
Мощность электродвигателя – это полезная механическая мощность на валу электродвигателя.
Мощность электродвигателя постоянного тока
Механическая мощность
Мощность – физическая величина, показывающая какую работу механизм совершает в единицу времени.
,
- где P – мощность, Вт,
- A – работа, Дж,
- t – время, с
Работа – скалярная физическая величина, равная произведению проекции силы на направление F и пути s, проходимого точкой приложения силы .
,
где s – расстояние, м
Для вращательного движения
,
где – угол, рад,
,
где – углавая скорость, рад/с,
Таким образом можно вычислить значение механической мощности на валу вращающегося электродвигателя
Справка: Номинальное значение – значение параметра электротехнического изделия (устройства), указанное изготовителем, при котором оно должно работать, являющееся исходным для отсчета отклонений.
Коэффициент полезного действия электродвигателя
Коэффициент полезного действия (КПД) электродвигателя – характеристика эффективности машины в отношении преобразования электрической энергии в механическую.
,
- где – коэффициент полезного действия электродвигателя,
- P1 – подведенная мощность (электрическая), Вт,
- P2 – полезная мощность (), Вт
При этом
потери в электродвигатели обусловлены:
электрическими потерями – в виде тепла в результате нагрева проводников с током;
магнитными потерями – потери на перемагничивание сердечника: потери на вихревые токи, на гистерезис и на магнитное последействие;
механическими потерями – потери на трение в подшипниках, на вентиляцию, на щетках (при их наличии);
дополнительными потерями – потери вызванные высшими гармониками магнитных полей, возникающих из-за зубчатого строения статора, ротора и наличия высших гармоник магнитодвижущей силы обмоток.
КПД электродвигателя может варьироваться от 10 до 99% в зависимости от типа и конструкции.
Международная электротехническая комиссия (International Electrotechnical Commission) определяет требования к эффективности электродвигателей. Согласно стандарту IEC 60034-31:2010 определено четыре класса эффективности для синхронных и асинхронных электродвигателей: IE1, IE2, IE3 и IE4.
где n – частота вращения электродвигателя, об/мин
Момент инерции ротора
Момент инерции – скалярная физическая величина, являющаяся мерой инертности тела во вращательном движении вокруг оси, равна сумме произведений масс материальных точек на квадраты их расстояний от оси
,
- где J – момент инерции, кг∙м2,
- m – масса, кг
Справка: В английской системе мер момент инерции измеряется в унция-сила-дюйм (oz∙in∙s2)
1 oz∙in∙s2 = 0,007062 kg∙m2 (кг∙м2)
Момент инерции связан с моментом силы следующим соотношением
,
где – угловое ускорение, с-2
,
Справка: Определение момента инерции вращающейся части электродвигателя описано в ГОСТ 11828-86
Номинальное напряжение
Номинальное напряжение (англ. rated voltage) – напряжение на которое спроектирована сеть или оборудование и к которому относят их рабочие характеристики .
Электрическая постоянная времени
Электрическая постоянная времени – это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое ток достигает уровня в 63,21% (1-1/e) от своего конечного значения.
,
где – постоянная времени, с
Механическая характеристика двигателя представляет собой графически выраженную зависимость частоты вращения вала от электромагнитного момента при неизменном напряжении питания.
Тестирование работы схемы
Сделайте все необходимые соединения в схеме, загрузите программу в плату Arduino и подайте питание на контроллер ESC. Убедитесь в том, что ваш BLDC двигатель надежно закреплен, иначе он будет прыгать во время вращения. Когда вы подадите питание на контроллер ESC вы услышите приветственный тон и он будет издавать этот звук до тех пор пока не поступит управляющий сигнал заданного уровня (в заданных границах). Начните постепенно вращать ручку потенциометра чтобы на его выходе напряжение стало отличным от 0, и этот звук прекратится. Это будет означать, что вы подали на контроллер ШИМ сигнал минимально допустимого уровня. При дальнейшем вращении ручки потенциометра двигатель начнет медленно вращаться. При дальнейшем повороте ручки потенциометра и увеличении напряжения на его выходе скорость вращения двигателя будет увеличиваться. Когда напряжение достигнет верхней допустимой границы двигатель остановится. В дальнейшем вы можете повторить весь этот процесс заново.
Коллекторные двигатели разной мощности
Коллекторные двигатели можно условно разделить на две подгруппы, с меньшими и с большими мощностными показателями. Маломощные модели отличаются наличием физического магнита, закрепленного на корпусе. Второй магнит при этом создается с помощью коллекторно-щеточного узла, когда на якорную обмотку подается напряжение.
Вращающий момент возникает в результате непрерывной смены полюсов якорного магнита (при прохождении якоря через «магнитную нейтраль»). Этот эффект достигается следующим образом:
- коллекторное кольцо посредством специальных пластин делится на сектора;
- к секторам последовательно подсоединяют концы обмоток якоря.
На более мощные движки физические магниты обычно не устанавливают, поскольку это сильно утяжеляло бы конструкцию. Чтобы создать постоянное магнитное поле, к шине питания (положительной или отрицательной) подключают стержни с обмотками, последовательным образом подсоединяя полюса одноименного типа.
Высокомощные коллекторные двигатели имеют некоторые конструктивные нюансы:
- количество установленных токосъемников (щеток) должно соответствовать количеству пар полюсов;
- в целях повышения эффективности работы мотора после запуска и смены нагрузки щеточный узел сдвигают на определенный угол относительно направления вращения.
Звони: +7-908-918-03-57
или пиши нам здесь…
Войти Регистрация
В чате:
Виктор Потехин
Поступила просьба разместить технологию обработки торфа электрогидравлическим эффектом.
Мы ее выполнили!
2018-04-06 19:21:11
2018-04-06 19:21:52
Виктор Потехин
Поступил вопрос о лазерной очистке металла. Дан ответ. В частности, указана более дешевая и эффективная технология.
2018-04-11 23:18:19
2018-04-18 20:53:11
Виктор Потехин
Поступил вопрос по термостабилизаторам грунтов в условиях вечной мерзлоты. Дан ответ.
2018-04-29 09:51:54
Виктор Потехин
Поступил вопрос по стеклопластиковым емкостям. Дан ответ.
2018-05-04 06:47:56
Виктор Потехин
Поступил вопрос по гидропонным многоярусным установкам. Дан ответ. В частности указаны более прорывные технологии в сельском хозяйстве.
2018-05-16 20:22:35
Виктор Потехин
Поступил вопрос по выращиванию сапфиров касательно технологии и оборудования. Дан ответ.
2018-05-16 20:23:28
Виктор Потехин
Поступил вопрос касательно мотор-колеса Дуюнова и мотор-колеса Шкондина, что лучше. Дан ответ.
2018-05-16 20:30:50
Виктор Потехин
2018-05-17 10:35:28
Виктор Потехин
Поступил вопрос касательно санации трубопровода. Дан ответ. В частности указана более инновационная технология.
2018-05-17 18:10:26
Виктор Потехин
Поступил вопрос касательно сотрудничества, а именно: определения направлений развития предприятия и составления планов будущего развития. В настоящее время ведутся переговоры. Будет проанализирована исходная информация, совместно выберем инновационные направления и составим планы.
2018-05-18 10:34:05
Виктор Потехин
Поступил вопрос касательно электрохимических станков. Дан ответ.
2018-05-18 10:35:57
Виктор Потехин
Поступил вопрос относительно пиролизных установок для сжигания ТБО. Дан ответ. В частности, разъяснено, что существуют разные пиролизные установки: для сжигания 1-4 класса опасности и остальные. Соответственно разные технологии и цены.
2018-05-18 11:06:55
Виктор Потехин
К нам поступают много заявок на покупку различных товаров. Мы их не продаем и не производим. Но мы поддерживаем отношения с производителями и можем порекомендовать, посоветовать.
2018-05-18 11:08:11
Виктор Потехин
2018-05-18 17:44:35
Виктор Потехин
2018-05-23 07:24:36
бесколлекторный двигатель постоянного тока купить обороты своими рукамисхема работа устройство мощность подключение характеристики принцип работы драйвер контроллер регулятор расчет скорости оборотов бесколлекторного двигателя своими рукамисхема управление бесколлекторным двигателем постоянного токаподключаем мощный трехфазный ардуино коллекторный и бесколлекторный двигатель разница для радиоуправляемой модели с датчиками стиральной машиныавиамодельные бесколлекторные двигатели для моделей авиамоделей алиэкспрессквадрокоптер с бесколлекторными двигателями arduinoотличия бесколлекторных двигателейрегулятор перемотка ротор настройка регулятора бесколлекторного двигателя схемабесколлекторный асинхронный двигательуправление бесколлекторным двигателем arduinoмощный бесколлекторный электродвигатель постоянного тока купить трехфазныйколлекторный и бесколлекторный электродвигатель для авиамоделей своими рукамиустройство бесколлекторного электродвигателяуправление бесколлекторными электродвигателями
Количество просмотров с 26 марта 2018 г.: 49
comments powered by HyperCommentsИсточник публикации