Принцип работы синхронного двигателя
Содержание:
- Принцип действия и устройство электромашин разных типов
- Режимы работы
- Способы возбуждения синхронных генераторов
- Синхронный и асинхронный двигатель отличия
- ПРЕИМУЩЕСТВА И НЕДОСТАТКИ СИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ
- Конструкция электрических машин синхронного типа с постоянными магнитами
- Устройство синхронного двигателя
- Асинхронный электродвигатель
- Способы пуска
Принцип действия и устройство электромашин разных типов
Асинхронные и синхронные электродвигатели похожи по конструкции, но есть и отличия.
Устройство и принцип действия асинхронных электродвигателей
Это самые распространённые машины переменного тока. Такие электродвигатели состоят из трёх основных частей:
- Корпус с подшипниковыми щитами и лапами или фланцем.
- В корпусе находятся магнитопровод из железных пластин с обмотками. Этот магнитопровод носит название статор.
- Вал с подшипниками и магнитпроводом. Эта конструкция называется ротор . В электродвигателях с короткозамкнутым ротором в магнитопроводе находятся соединённые между собой алюминиевые стержни, эта конструкция носит название «беличья клетка». В машинах с фазным ротором вместо стержней намотаны обмотки.
В пазах статора со сдвигом 120° намотаны три обмотки. При подключении к трёхфазной сети в статоре наводится вращающееся магнитное поле. Скорость вращения называется «синхронная скорость».
Справка! В однофазных электродвигателях вращающееся поле создаётся дополнительной обмоткой или конструктивными особенностями статора.
Это поле наводит ЭДС в роторе, возникающий при этом ток создаёт своё поле, взаимодействующее с полем статора и приводящее его в движение. Скорость вращения ротора меньше синхронной скорости. Эта разница называется скольжение.
Рассчитывается скольжение по формуле S=(n1-n2)/n1*100%, где: · n1 — синхронная скорость; · n2 — скорость вращения ротора.
Номинальная величи
на скольжения в обычных электромоторах 1-8%. При увеличении нагрузки на валу двигателя скольжение и вращающий момент растут до критической величины, при достижении которой двигатель останавливается.
В электродвигателях с фазным ротором вместо беличьей клетки в пазах ротора намотаны три обмотки. Через токосъёмные кольца и щётки они подключаются к добавочным сопротивлениям. Эти сопротивления ограничивают ток и магнитное поле в роторе. Это увеличивает скольжение и уменьшает скорость двигателя.
Такие аппараты используются при тяжёлом пуске и в устройствах с регулировкой скорости, например, в мостовых кранах.
Принцип действия синхронных электродвигателей
Эти двигатели устроены сложнее и дороже асинхронных машин. Их достоинство в постоянной скорости вращения, не меняющейся при нагрузке. Статор синхронной машины не отличается от асинхронной. Отличие в роторе. В отличие от асинхронного двигателя, вращение осуществляется за счёт взаимодействия вращающегося магнитного поля статора и постоянного поля ротора. Для его создания в роторе находятся электромагниты. Напряжение к катушкам подводится при помощи токосъёмных колец и графитных щёток.
Справка! В роторе синхронных машин малой мощности вместо электромагнитов установлены постоянные или просто магнитопровод имеет явновыраженные полюса. Скольжение, как в асинхронных машинах, отсутствует, и частота вращения определяется только частотой питающего напряжения.
Режимы работы
Большинство электрических машин обладают обратимой функцией, не составляют исключения и синхронные агрегаты. Их также можно использовать в качестве электрического привода или в качестве генератора, вырабатывающего электроэнергию. Оба режима отличаются способом воздействия на электрическую машину – подачу напряжения на рабочие обмотки или приведение в движение ротора за счет механического усилия.
Генераторный режим
Для производства электроэнергии в сеть используются именно синхронные генераторы. В большинстве случаев для этой цели используются электрические машины с фазными обмотками на статоре, что существенно упрощает процесс съема мощности и дальнейшей передачи ее в сеть. Физически генерация происходит при воздействии электромагнитного поля обмотки возбуждения синхронного генератора с обмотками статора. Силовые линии поочередно пересекают фазные витки и наводят в них ЭДС взаимоиндукции, в результате чего на клеммных выводах возникает напряжение.
Частота получаемого напряжения напрямую зависит от скорости вращения вала и вычисляется по формуле:
f = (n*p)/60 ,
где n – скорость вращения вала, измеряемая в оборотах за минуту, p – количество пар полюсов.
Синхронный компенсатор
В виду физических особенностей синхронного электродвигателя при холостом ходе аппарата он потребляет из сети реактивную мощность, что позволяет существенно улучшить cosφ системы, практически приближая его к 1.На практике режим синхронного компенсатора используется как для улучшения коэффициента мощности, так и для стабилизации параметров напряжения сети.
Двигательный режим
В синхронной машине двигательный режим осуществляется при подаче рабочего трехфазного напряжения на обмотки якоря. После чего электромагнитное поле якоря начинает толкать магнитное поле ротора, и вал приходит во вращение. Однако на практике двигательный режим осуществляется не так просто, так как мощные агрегаты не могут самостоятельно набрать необходимый ресурс скорости. Поэтому во время запуска используют специальные методы и схемы подключения.
Способы возбуждения синхронных генераторов
Самым распространенным способом создания основного магнитного потока синхронных генераторов является электромагнитное возбуждение, состоящее в том, что на полюсах ротора располагают обмотку возбуждения, при прохождении по которой постоянного тока, возникает МДС, создающая в генераторе магнитное поле.
До последнего времени для питания обмотки возбуждения применялись преимущественно специальные генераторы постоянного тока независимого возбуждения, называемые возбудителями В (рис. 1.3, а). Обмотка возбуждения (ОВ) получает питание от другого генератора (параллельного возбуждения), называемого подвозбудителем (ПВ).
Ротор синхронного генератора, возбудителя и подвозбудителя располагаются на общем валу и вращаются одновременно. При этом ток в обмотку возбуждения синхронного генератора поступает через контактные кольца и щётки. Для регулирования тока возбуждения применяют регулировочные реостаты, включаемые в цепи возбуждения возбудителя r1 и подвозбудителя r2 .
В синхронных генераторах средней и большой мощности процесс регулирования тока возбуждения автоматизируют.
В синхронных генераторах получила применение также бесконтактная система электромагнитного возбуждения, при которой синхронный генератор не имеет контактных колец на роторе. В качестве возбудителя в этом случае применяют обращенный синхронный генератор переменного тока В (рис. 1.3, б). Трехфазная обмотка 2 возбудителя, в которой наводится переменная ЭДС, расположена на роторе и вращается вместе с обмоткой возбуждения синхронного генератора и их электрическое соединение осуществляется через вращающийся выпрямитель 3 непосредственно, без контактных колец и щёток. Питание постоянным током обмотки возбуждения 1 возбудителя В осуществляется от подвозбудителя ПВ – генератора постоянного
тока. Отсутствие скользящих контактов в цепи возбуждения синхронного генератора позволяет повысить её эксплуатационную надёжность и увеличить КПД.
В синхронных генераторах, в этом числе гидрогенераторах, получил распространение принцип самовозбуждения (рис. 1.4, а), когда
энергия переменного тока, необходимая для возбуждения, отбирается от обмотки статора синхронного генератора и через понижающий
трансформатор и выпрямительный полупроводниковый преобразователь ПП преобразуется в энергию постоянного тока. Принцип самовозбуждения основан на том, что первоначальное возбуждение генератора происходит за счёт остаточного магнетизма машины.
На рис. 1.4, б представлена структурная схема автоматической системы самовозбуждения синхронного генератора (СГ) с выпрямительным трансформатором (ВТ) и тиристорным преобразователем (ТП), через которые электроэнергия переменного тока из цепи статора СГ после преобразования в постоянный ток подаётся в обмотку возбуждения. Управление тиристорным преобразователем осуществляется посредством автоматического регулятора возбуждения АРВ, на вход которого поступают сигналы напряжения на входе СГ (через трансформатор напряжения ТН) и тока нагрузки СГ (от трансформатора тока ТТ). Схема содержит блок защиты (БЗ), обеспечивающий защиту обмотки возбуждения (ОВ) от перенапряжения и токовой перегрузки.
Мощность, затрачиваемая на возбуждение, обычно составляет от 0,2 до 5 % полезной мощности (меньшее значение относится к генераторам большой мощности).
В генераторах малой мощности находит применение принцип возбуждения постоянными магнитами, расположенными на роторе машины. Такой способ возбуждения даёт возможность избавить генератор от обмотки возбуждения. В результате конструкция генератора существенно упрощается, становится более экономичной и надёжной. Однако, из-за высокой стоимости материалов для изготовления постоянных магнитов с большим запасом магнитной энергии и сложности их обработки применение возбуждения постоянными магнитами ограничено машинами мощностью не более нескольких киловатт.
Синхронные генераторы составляют основу электроэнергетики, так как практически вся электроэнергия во всём мире вырабатывается посредством синхронных турбо- или гидрогенераторов.
Так же синхронные генераторы находят широкое применение в составе стационарных и передвижных электроустановок или станций в комплекте с дизельными и бензиновыми двигателями.
Синхронный и асинхронный двигатель отличия
Существуют различные виды электродвигателей, и очень часто возникает вопрос, в чем же отличия между синхронным и асинхронным двигателем. В асинхронном обмотки, расположенные в статоре, создают вращающееся магнитное поле, взаимодействующее с токами, образующимися в роторе, благодаря чему он приходит во вращающееся состояние. Поэтому, в настоящее время, наиболее популярным считается простой и надежный асинхронный электродвигатель, имеющий короткозамкнутый ротор.Асинхронный двигатель
В его пазах расположены токопроводящие стержни из алюминия или меди, соединенные своими концами с кольцами из такого же материала, которые производят короткое замыкание этих стержней. Поэтому, ротор и называется короткозамкнутым. Вихревые токи, взаимодействующие с полем, вызывают вращение ротора со скоростью, меньшей, чем скорость вращения самого поля. Таким образом, весь двигатель получил название асинхронного. Это движение получило название относительного скольжения, поскольку скорости ротора и магнитного поля неравны и магнитное поле не пересекается с токопроводящими стержнями ротора. Поэтому, они не создают вращающийся момент.
Принципиальным отличием обоих видов двигателей является исполнение ротора. В синхронном он представляет собой постоянный магнит относительно небольшой мощности или такой же электромагнит. Вращающийся магнит, создающий магнитное поле статора, приводит в движение магнитный ротор. Скорость движения статора и ротора, в этом случае, одинаковая. Поэтому, данный двигатель получил название синхронного.
Особенности синхронного двигателя
Синхронный двигатель отличается возможностью значительного опережения током напряжения по фазе. Повышая коэффициент мощности по типу конденсаторных батарей.
Асинхронные электродвигатели отличаются простотой конструкции и надежностью в эксплуатации. Единственный недостаток этих агрегатов заключается в достаточной трудности регулировки частоты их вращения. Трехфазные асинхронные двигатели могут быть легко реверсированы, то есть вращение двигателя может измениться на противоположное направление. Для этого, достаточно изменить место расположения двух линейных проводов или фаз, которые замыкаются на обмотку статора
В отличие от синхронного, это простой и дешевый двигатель, применяющийся повсеместно.
Синхронный и асинхронный двигатель имеет еще и такое важное отличие, как постоянная частота вращения у первого при различных нагрузках. Поэтому их применяют в приводах машин, требующих постоянных скоростей, например, в компрессорах, насосах или вентиляторах, поскольку они очень легки в управлении.
electric-220.ru
ПРЕИМУЩЕСТВА И НЕДОСТАТКИ СИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ
В сравнении с другими образцами машин переменного тока синхронные имеют следующие бесспорные преимущества:
- постоянство скорости вращения приводного вала при нагрузке, меняющейся в широких пределах;
- высокие показатели кпд и передачи полезной мощности в нагрузку;
- сравнительно низкий коэффициент реактивной составляющей;
- возможность длительной работы в режиме перегрузки;
- меньшая зависимость от колебаний напряжения в питающей сети.
Указанные преимущества и определяют области их применения: мощные вентиляционные системы, конвейерные линии, компрессоры и прокатные станы.
К числу существенных недостатков электродвигателей синхронного типа относят:
- сложность конструкции и сравнительно высокая стоимость;
- технические сложности с запуском электродвигателя в работу;
- потребность в дополнительном источнике постоянного напряжения;
- сложность управления основными параметрами двигателя (скоростью вращения и моментом на валу).
Все перечисленные недостатки синхронных машин переменного тока устраняются за счет использования дополнительных систем плавного запуска. Хорошего результата удается добиться, если для управления работой двигателя используются электронные устройства (частотные преобразователи).
Конструкция электрических машин синхронного типа с постоянными магнитами

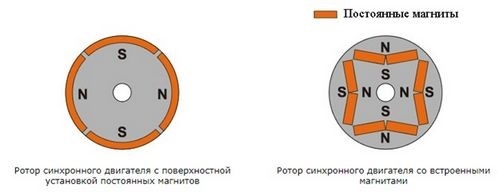
СДПМ состоит из подвижной (ротора) и неподвижной (статора) части. Исполнение ротора различается:
- По установке магнитов. Они могут размещаться на поверхности (SPMSM ) и внутри (IPMSM) вращающегося узла. Роторы со встроенными магнитами применяются в двигателях, работающих при значительной нагрузке на валу и высоких скоростях. Стоимость таких роторов существенно выше.
- По конструкции (явнополюсные и неявнополюсные роторы). Последние имеют равную индуктивность по осям горизонтальной плоскости. Роторы с явновыраженными полюсами имеют разное отношение индуктивности.
Постоянные магниты изготавливают из ферритов, сплавов редкоземельных металлов и других материалов с высокой коэрцитивной силой.
Статор синхронных электрических машин состоит из сердечника, набранного из листов электротехнической стали, и двух- или трехфазной обмотки. Различают статоры с распределенной и сосредоточенной обмоткой. Первая имеет различное положения витков в магнитном поле. Витки в сосредоточенных обмотках имеют одинаковое положение.
Сосредоточенная обмотка:

Распределенная обмотка:
Устройство синхронного двигателя
Синхронный двигатель состоит из основных частей – якоря и индуктора. Обычно, его исполнение сделано таким образом, что якорь расположен на статоре, а индуктор – на роторе, отделенном воздушной прослойкой. Данные агрегаты обладают высоким коэффициентом мощности. Существенным плюсом является возможность их использования в сетях с любым напряжением.
Конструкция синхронного двигателя состоит из двух основных частей – статора и ротора. Статор является неподвижной частью агрегата, а ротор – подвижной. В состав якоря входят одна или несколько обмоток переменного тока. При работе двигателя токи, поступающие в якорь, приводят к вращению магнитного поля, пересекающегося с полем индуктора и преобразующего энергию. Поле якоря носит другое название – поле реакции якоря. В генераторе такое поле создается с помощью индуктора.
В состав индуктора входят электромагниты постоянного тока, называемые полюсами. Во всех синхронных электродвигателях индукторы бывают двух конструкций – явнополюсная и не явнополюсная, отличающиеся расположением полюсов. Конструкция статора включает в себя корпус и сердечник, в состав которого входят двух- и трехфазные обмотки. Сами обмотки могут быть распределенными и сосредоточенными.
Чтобы уменьшить магнитное сопротивление и улучшить прохождение магнитного потока, используются ферромагнитные сердечники, расположенные в роторе и статоре, для изготовления которых используется электротехническая сталь. Она обладает интересными свойствами, например, повышенным содержанием кремния, с целью повышения ее электрического сопротивления и уменьшения вихревых токов.
Каждый синхронный электродвигатель обладает важным параметром – электромагнитным моментом. Он возникает в том случае, когда магнитный поток ротора начинает взаимодействовать с вращающимся магнитным полем. Данное поле образуется под влиянием трехфазного тока, протекающего по обмотке якоря.
В режиме холостого хода происходит совпадение осей магнитных полей ротора и статора. Поэтому электромагнитные силы, возникающие между их полюсами, принимают радиальное направление и значение электромагнитного момента агрегата становится равным нулю. При переходе устройства в двигательный режим, на ротор начинает воздействовать внешние нагрузочный момент, приложенный к валу. В результате, происходит смещение ротора на величину определенного угла против направления вращения.
Подобное электромагнитное взаимодействие между ротором и статором приводит к созданию электромагнитных сил, направленных в сторону вращения. Таким образом, действие вращающегося электромагнитного момента стремится к преодолению действия внешнего момента. Максимальное значение электромагнитного момента образует угол 90 градусов, при расположении полюсов ротора между осями полюсов статора.
Если значение нагрузочного момента, приложенного к валу двигателя, превысит максимальный электромагнитный момент, в этом случае двигатель остановится под влиянием внешнего момента. Из-за этого в неподвижном двигателе по обмотке якоря будет проходить очень высокий ток. Данный режим является аварийным, он представляет собой выпадение из синхронизма и на практике не должен допускаться.
Асинхронный электродвигатель
Асинхронный электродвигатель — основной привод, используемый в промышленности. К примеру, в автомобилестроении он используется в электроусилителях рулевого управления и в гибридных автомобилях. В следующем разделе представлена концепция работы асинхронного двигателя как индукционной машины. Приведен также энергетический анализ асинхронного двигателя в силу его явного преобладания среди приводов.
Устройство асинхронного электродвигателя
Различают двигатели с внешним ротором и внутренним ротором. У двигателей с внешним ротором статор находится внутри ротора, у двигателей с внутренним ротором наоборот — ротор находится внутри статора. На принципиальной схеме (рис. «Принцип работы асинхронного двигателя» ) показана принципиальная схема асинхронного двигателя с внутренним ротором.
Ротор состоит из короткозамкнутого каркаса с пакетом пластин (рис. «Короткозамкнутая клетка асинхронного электродвигателя» ), в качестве примера с четырьмя короткозамкнутыми стержнями). Пакет пластин полностью заполняет пространство короткозамкнутого каркаса (на рис. не показано). Он состоит из отдельных стальных листов, изолированных друг от друга, чтобы свести к минимуму потери вихревых токов.
Рабочие характеристики асинхронного электродвигателя
Обмотка статора создает вращающееся поле с трехфазным переменным током. Между скоростью вращающегося поля и скоростью ротора возникает разница, создающая индукцию магнитно-эффективного тока в роторе, которая в свою очередь способствует созданию крутящего момента.
Двухполосный короткозамкнутый ротор(osВЕ с
ΦEds = -d/dt∫∫BEdA (уравнение 12)
На основании этого уравнения и конструктивных переменных двигателя (см. рис. 13) получаем:
2E (l+2r) п = 2lr·ВЕ·ω sin(ωt) (уравнение 13)
где:
Е = I · Аnom/к (к — удельная электропроводность), напряжение создает магнитноэффективную мощность
i = (к·Аnomlr·ωs/(l+r))·sin(ωst) (уравнение 14)
в проводящем контуре, магнитное поле которого
Hind = i·N/lFe
и плотность потока (магнитная индукция)
Bind = μ·Hind
ослабляет исходное вращающееся поле ВЕ (индуктивное сопротивление). Нижеследующее уравнение применимо для получения результирующей магнитной индукции:
BR= BE-Bind
В уравнении Максвелла (уравнение 13) вместо ВЕ остается результирующая магнитная индукция BR. На проводящий контур воздействует тангенциальная сила Ft:
Ft = i l BR sin(ωst) (уравнение 15)
(сила Лоренца). Она используется для вычисления крутящего момента. Для уравнений 14 и 15 справедливо следующее:
M=2 Ft r = (2 k·Anom ωs/(l+r))·(lr·BR sin(ωst))2
Распределение крутящего момента асинхронного двигателя
При увеличении угловой частоты индуктивное сопротивление сначала приводит к увеличению крутящего момента вплоть до достижения переломного момента. Это максимально возможный крутящий момент двигателя. Впоследствии он падает из-за увеличивающегося влияния индуктивного сопротивления. Рассеяние мощности Рv, возникающее в проводящем контуре, вычисляется на основе сопротивления проводящего контура Rs и тока, наведенного в контуре is
Pv = Rs— is2
Таким образом, рассеяние мощности растет пропорционально квадрату наведенного тока.
Классы эффективности двигателей
СЕМЕР Европейский Комитет изготовителей электродвигателей и силовой электроники) ввел классификацию эффективности на базе трех классов (EFF1, EFF2 и EFF3). Классы эффективности применяются к трехфазным асинхронным двигателям с двумя и четырьмя полюсами, а также с выходной мощностью от 1,1 до 90 кВт (рис. «Эффективность и выходная мощность» ).
Способы пуска
За счет значительной инерции ротора он не способен сдвинуться под нагрузкой полем статора. В случае подачи рабочего напряжения не удастся получить устойчивую магнитную связь и вращение не начнется. Для решения этой задачи применяются способы запуска ротора до определенной скорости вращения. Как правило, это то число оборотов, которое приближается к значению в режиме синхронной работы.
Среди наиболее распространенных способов приведения синхронного двигателя в движение можно выделить:
- Асинхронный пуск – этот способ обеспечивается путем введения в конструкцию ротора стальных элементов в форме беличьей клетки. При подаче напряжения в клетке наводится ЭДС и возникает магнитное взаимодействие. Основным недостатком данного способа являются большие пусковые токи, в разы превышающие номинальный режим синхронного двигателя. Поэтому в схеме запуска используются реакторы или автотрансформаторы для снижения негативного воздействия.
- Частотный пуск – обеспечивается посредством частотных преобразователей. Которые снижают частоту питающего напряжения на рабочих обмотках. Это позволяет замедлить скорость вращения магнитного поля синхронного двигателя. Благодаря чему начинается вращение ротора.
- Двигательный пуск – для начала движения вал синхронного агрегата подсоединяется к разгонному двигателю. На этапе старта вращение обеспечивается от приводной электрической машины. Как только основной двигатель выйдет на подсинхронную скорость, разгонный агрегат выводится из работы.
Для каждого из способов используются соответствующие схемы и оборудование, позволяющие оптимизировать режим работы. Поэтому далее рассмотрим несколько характерных примеров для каждого способа запуска.
Асинхронный пуск
В этом способе используются синхронные двигатели специального типа, но скорость нарастания тока и его величину в рабочих обмотках принудительно снижают. Для этого устанавливаются реакторы или автотрансформаторы.
Как видите на схеме, в цепь питания каждой фазной обмотки синхронного двигателя устанавливается реактор. При включении контактора К2 напряжение подается на обмотки ток в реакторе не может вырасти скачкообразно. Поэтому пуск электродвигателя получается более плавным, чем в случае прямого включения. При разгоне электрической машины до подсинхронной скорости шунтирующий выключатель К1 выводит индуктивный элемент из цепи и агрегат работает в штатном режиме.
В данной схеме происходит автоматическое снижение напряжения на рабочих обмотках синхронного двигателя за счет автотрансформатора. Регулятор Р3 плавно повышает разность потенциалов до установившейся величины, ток при этом пропорционально нарастает. После достижения номинального момента, выключатель К1 зашунтирует автотрансформатор. Этот способ позволяет снижать пусковые токи со значительно большим усилием, чем в случае применения реакторов.
Частотный пуск
Основой современного частотного пуска являются схемы на полупроводниковых элементах, как правило, тиристорных преобразователях. Такие устройства снижают частоту изменения кривой напряжения, но практически не нарушают действующее значение.
Такой способ запуска сокращает время на разгон синхронного двигателя и снижает значение токовой нагрузки в момент пуска. Однако, современная схема частотного пуска имеет куда более сложную реализацию:
Двигательный пуск
Способ двигательного запуска предусматривает одновременную установку на один вал и синхронного, и разгонного двигателя. Старт вращения обеспечивает асинхронный разгонный электродвигатель, который легко набирает обороты под нагрузкой. Синхронный агрегат включается в работу при достижении подсинхронной скорости вращения.
Однако существенным недостатком такого способа является длительный промежуток времени от старта до момента вхождения электрической машины в синхронизм.
Источник