Синхронная машина
Содержание:
- Система трехфазного тока
- Физические процессы в асинхронном двигателе
- Принцип действия
- Сравнение
- Принцип действия
- Принцип работы двигателя
- Статор асинхронного двигателя
- 5.3. ПРИНЦИП ДЕЙСТВИЯ АСИНХРОННОГО ДВИГАТЕЛЯ
- Что такое асинхронное обучение
- Аналогия с муфтой
- Режимы работы
- Трехфазный асинхронный двигатель с фазным ротором
Система трехфазного тока
Техническое значение имеет применение системы трехфазного переменного тока в качестве системы трехфазного тока, основной особенностью которой является то, что сумма всех напряжений и токов всегда равна нулю.
Электрические цепи называются фазами т. Совокупность электрических цепей, в которых напряжения одной частоты оказывают воздействие и имеют фазовый, сдвиг называются многофазными системами. Многофазная система состоит из ветвей обмотки. В многофазной системе может быть п = 3 симметричных систем (рис. «Симметричные системы» ). Во всех симметричных системах — за исключением нулевой системы — сумма всех векторов равна нулю. При количестве фаз т получаем п симметричных систем в зависимости от угла сдвига фаз а:
а = 2π n/m
Задача обмоток — создание вращающегося поля. Асинхронные двигатели имеют такую же конструкцию статора. В воздушном зазоре должно создаваться магнитное поле с постоянной амплитудой, вращающееся с постоянной угловой скоростью. Чтобы создать это поле, временные положения фаз токов должны совпадать с пространственными положениями соответствующих ветвей. У простой симметричной системы (п = 1) с т = 3 три ветви (обозначаемые как U, V и W) и, следовательно, обмотки должны быть равномерно распределены по окружности. На рис. «Обмотка двухполюсного двигателя с одной парой полюсов на каждую ветвь» показано расположение обмотки с тремя ветвями, с одной катушкой на каждую пару полюсов и ветвь. Схемы соединений фаз регламентируются стандартом DIN EN 60034, часть 8.
Создание вращающегося поля
п =т =
аеI = 360°·1/3 = 120°.
При одной катушке на каждую пару полюсов и ветвь создаваемое магнитное поле вращается против часовой стрелки, при этом «индикаторная полоска», смещающаяся вправо на рисунке а, «Создание вращающегося поля с одной катушкой на ветвь» (при а = 90°), показывает ток фазы в каждой из ветвей на рис. Ь, «Создание вращающегося поля с одной катушкой на ветвь» в направлении магнитного потока. Расположение образует пару полюсов. Соответствующие магнитные потоки проходят вертикально к плоскости ветвей обмотки (рис. Ь, «Создание вращающегося поля с одной катушкой на ветвь»).
Поток ФRes (рис. с, «Создание вращающегося поля с одной катушкой на ветвь»), получаемый из трех ветвей, а также его направление достигаются геометрическим сложением трех отдельных потоков ФU, ФV И ФW.
Продвижение индикаторной полоски на угол а = 180° приводит к реверсированию направления тока в ветви W и, следовательно, к дальнейшему повороту созданного поля ФRes вправо (рис. «Создание вращающегося поля с одной катушкой на ветвь 2»).
(рОбмотка с двумя парами полюсов на каждую ветвь
am = 360° · (1/mp) = 60°.
Электрически эффективный угол остается без изменения. В случае как двухполюсного, так и четырехполюсного расположения поле вращается против часовой стрелки (рис. «Создание вращающегося поля с двумя катушками на ветвь» ). Чаcтоту вращения поля:
nd = fn/p
можно вычислить на основании частоты в линии fn и количества пар полюсов р. При р = 1 частота вращения поля равна частоте в линии (табл. «Частота вращающихся полей» ).
Вместе с количеством пар полюсов можно вычислить межполюсное расстояние:
τp = dsi /2π
dsiaeiam.aei=p—am.aeiτp
РЕКОМЕНДУЮ ЕЩЁ ПОЧИТАТЬ:
Физические процессы в асинхронном двигателе
Вращающийся магнитный поток двигателя пересекает обмотки ротора и статора и наводит в них электродвижущие силы — э.д.с. Э.д.с. фазы статора определяется по формуле, В:
E1 = 4,44f1W1Kоб1Ф,
f1 — частота тока в обмотке статора, Гц;
W1 — число витков фазы статора;
Kоб1 — обмоточный коэффициент обмотки статора (обычно он близок к единице (0,85—0,97));
Ф — магнитный поток, Вб. Э.д.с. фазы ротора, В:
E2 = 4,44f2W2Kоб2Ф.
Частота тока в обмотке ротора меньше, чем в обмотке статора. Объясняется это тем, что обмотка статора пересекается потоком с частотой вращения n1, а обмотка ротора — с частотой вращения n.
Частоты тока ротора и статора связаны зависимостью
f2 = f1S.
Отношение э.д.с. фазы статора к э.д.с. фазы неподвижного ротора называется коэффициентом трансформации э.д.с.:
Отношение роторного тока при пуске двигателя (S = 1) к статорному называется коэффициентом трансформации токов:
I1, I2 — токи в обмотке статора и ротора;
m1, m2 — число фаз статора и ротора.
Для двигателя с фазным ротором m1 = m2 = 3.
Для двигателя с короткозамкнутым ротором m2 = Z2, где: Z2 — число пазов ротора.
При пуске двигателя э.д.с. фазы ротора имеет максимальное значение, так как S = 1 и по замкнутой обмотке ротора течет очень большой ток. Большой роторный ток при пуске вызывает соответственно пусковой ток в статорной обмотке, который в 5—7 раз больше номинального. Затем скольжение уменьшается, величина э.д.с. в роторе падает и уменьшается ток в обмотках ротора и статора. При работе без нагрузки частота вращения ротора близка к частоте поля, скольжение близко к нулю, и роторный ток очень мал, так как мала э.д.с.
Ток в обмотке статора при холостом ходе двигателя является намагничивающим, и его величина составляет 0,20—0,60 номинального.
Значительная величина тока холостого хода объясняется наличием воздушного зазора между активной сталью статора и ротора. По мере нагрузки двигателя ротор притормаживается, скольжение и э.д.с. ротора увеличиваются, что приводит к увеличению роторного и статорного токов.
Вращающий момент асинхронного двигателя возникает в результате взаимодействия вращающего магнитного потока и роторного тока; он может быть определен по формуле, Н·м:
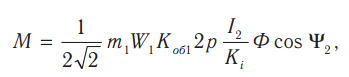
где:
Ф — магнитный поток, Вб;
Ψ2— угол между э.д.с. ротора и током ротора.
При нормальных режимах работы двигателя можно считать, что cos Ψ2= Обозначив постоянные величины в формуле момента через СМ, получим, Н·м:
M = CMФI2.
При постоянном напряжении сети поток двигателя Ф мало изменяется и момент зависит от величины роторного тока, а роторный ток зависит от скольжения, — следовательно, момент двигателя зависит от скольжения. Номинальный момент двигателя может быть определен по формуле, кг·м:
Номинальный момент двигателя — это момент на валу двигателя.
Момент двигателя измеряют в ньютонометрах (Н·м) или в килограммометрах (кг·м). Ньютонометр меньше килограммометра в 9,81 раза.
Принцип действия
Картина магнитного поля при работе асинхронного двигателя. Видно скольжение ротора относительно поля.
На обмотку статора подаётся переменное трехфазное напряжение, под действием которого по этим обмоткам протекает трехфазная система токов. Поскольку обмотки в асинхронной машине сдвинуты друг от друга в геометрическом отношении на 120 градусов, и, так как в симметричной системе токи в обмотках имеют фазовый сдвиг в 120 градусов, в таких обмотках создаётся вращающееся магнитное поле. Вращающееся магнитное поле, пересекая проводники обмотки ротора, индуцирует в них электродвижущую силу, под действием которой в обмотке ротора протекает ток, который искажает магнитное поле статора, увеличивая его энергию, что ведет к возникновению электромагнитной силы, под действием которой ротор начинает вращаться (для более простого объяснения, можно сослаться на силу Ампера, действующую на проводники обмотки ротора, которые находятся в магнитном поле статора; однако, в действительности, величина магнитной индукции в пазу, где располагается проводник с током, достаточно мала, поскольку магнитный поток проходит преимущественно по зубцам).
Чтобы в обмотке ротора возникала ЭДС, необходимо, чтобы скорость вращения ротора отличалась от скорости вращения поля статора. Поэтому ротор вращается асинхронно относительно поля статора, а двигатель называется асинхронным. Относительная разность скорости вращения ротора от скорости вращения поля статора называется скольжением (s). Номинальное скольжение обычно составляет 2-8% .
Сравнение
Главное отличие синхронного двигателя от асинхронного заключается в соотношении величины частот вращения ротора и магнитного поля. В агрегате первого типа оба показателя одинаковые. В асинхронной машине — разные.
Можно отметить, что электродвигатели второго типа в целом более распространены, чем первые. При этом асинхронные агрегаты чаще всего представлены в разновидности, в которой инсталлирован короткозамкнутый ротор. Данные устройства имеют ряд важнейших преимуществ перед электродвигателями иных категорий. А именно:
- простота конструкции, надежность;
- относительно невысокая себестоимость производства, эксплуатации;
- способность функционирования при задействовании имеющихся ресурсов сети без подключения преобразователей.
Вместе с тем асинхронные машины с короткозамкнутым ротором обладают и рядом недостатков. А именно:
- наличие малого пускового момента;
- наличие большого пускового тока;
- пониженный коэффициент мощности;
- низкая управляемость с точки зрения регулирования скорости;
- зависимость максимальной скорости от частоты электрической сети;
- электромагнитный момент в асинхронных двигателях рассматриваемого типа характеризуется сильной чувствительностью к снижению напряжения в сети.
В свою очередь, у синхронных агрегатов также есть неоспоримые достоинства. К таковым можно отнести:
- относительно невысокую чувствительность к перепадам напряжения в сети;
- стабильность вращения вне зависимости от нагрузки на ротор.
Есть у синхронных двигателей и недостатки:
- относительная сложность конструкции;
- сложность запуска ротора в ход.
Отмеченные особенности работы синхронных и асинхронных агрегатов делают оптимальным использование первых в случае, если требуемая мощность двигателя в системе (например, как части инфраструктуры фабричной линии) должна составлять порядка 100 кВт и более. В остальных случаях задействование асинхронных машин, как правило, становится более предпочтительным.
Рассмотрев, в чем разница между синхронным и асинхронным двигателем, отразим выводы в таблице.
Принцип действия
При подаче напряжения на неподвижные обмотки статора, оно создает магнитное в статора. Если подается напряжение переменного тока, то магнитный поток, созданный им, изменяется. Так статор производит изменение магнитного поля, и ротор получает магнитные потоки.
Таким образом, ротор электродвигателя принимает эти поток статора и, следовательно, вращается. Это основной принцип работы и скольжения в асинхронных машинах. Из вышеизложенного следует отметить, что магнитный поток статора (и его напряжение) должно быть равно переменному току для вращения ротора, так что асинхронная машина может работать только от сети переменного тока.
Принцип работы асинхронного двигателя
Когда такие двигатели действуют в качестве генератора, они будет генерировать непосредственно переменный ток. В случае такой работы, ротор вращается с помощью внешних средств скажем, турбины. Если ротор имеет некоторый остаточный магнетизм, то есть некоторые магнитные свойства, которые сохраняет по типу магнита внутри материала, то ротор создает переменный поток в стационарной обмотке статора. Так что это обмотки статора будут получать наведенное напряжение по принципу индукции.
Индукционные генераторы используются в небольших магазинах и домашних хозяйствах, чтобы обеспечить дополнительную поддержку питания и являются наименее дорогостоящими из-за легкого монтажа. В последнее время они широко используется людьми в тех странах, где электрические машины теряют мощность из-за постоянных перепадов напряжения в питающей электросети. Большую часть времени, ротор вращается при помощи небольшого дизельного двигателя соединенного с асинхронным генератором переменного напряжения.
Принцип работы двигателя
Вне зависимости от конструктивного исполнения двигателя внутреннего сгорания, сохраняется общий принцип работы, основанный на том, что поршни, под воздействием энергии расширяющегося в камерах цилиндров газа двигаются прямолинейно, с получением на выходе вращения коленчатого вала. От него вращательное движение через трансмиссию передается на ходовые колеса или другие исполнительные механизмы.
Детальнее о том, как работает двигатель внутреннего сгорания, показано на примере двух- и четырехтактных установок.
Принцип работы двухтактного двигателя
Двухтактный двигатель работает в такой последовательности:
- поршень начинает двигаться снизу вверх, в начале цикла пребывая в нижней мертвой точке – после сжатия воздушно-топливной смеси, она воспламеняется с поджиганием в максимально верхнем положении;
- при сгорании, поршень выталкивается вниз, с открытием выпускного клапана, за счет которого продукты сгорания высвобождают камеру.
Описанный цикл повторяется в таком же порядке, с одновременным впуском и сжатием. По мере передвижения поршня вверх, в подпоршневое пространство втягивается воздух, с его переходом по каналу в надпоршневую часть, после достижения верхней мертвой точки.
Двухтактные двигатели внутреннего сгорания получили ограниченное применение. Такие силовые установки размещают на небольших механизмах – скутерах и мопедах, легких моторных катерах и лодках, газонокосилках.
Принцип работы четырехтактного двигателя
Полный цикл работы четырехтактного двигателя состоит из таких отдельных этапов:
- впуска – с движением поршня вниз, с нижней мертвой точке; в начале опускания срабатывает впускной клапан, открывая доступ для топливо-воздушной смеси (или исключительно воздуха, при непосредственном впрыске); в камере сгорания создается необходимое давление (возможна дополнительная подача воздуха, при наличии турбонадува);
- сжатия – после достижения крайней нижней точки, поршень двигается вверх; перекрывается впуск воздуха, а камера сжимается до критической отметки давления, с распыленным топливом в объеме над поршнем;
- рабочего хода – при максимальном сокращении объема камеры сгорания, топливо воспламеняется самопроизвольно (для дизельного мотора) или от поданной искры свечи (для бензинового); расширившийся газ двигает поршень вниз, к нижней мертвой точке;
- выпуска – с открытием выпускного клапана и вытеснением поршнем сгоревших газов из камеры, при возвращении в верхнюю мертвую точку.
При общем количестве тактов – четыре, лишь один включает получение полезной работы, когда поршень двигается под воздействием расширяющихся газов в камере сгорания. Три остальных такта несут вспомогательную нагрузку, с новым впрыском топлива, созданием необходимого давления и выпуском отработанных газов.
Учитывая особенности работы, по завершении цикла коленчатый вал остановился бы, поскольку система достигает точки равновесия. Но вращение продолжает маховик, придающий инерцию коленчатому валу, с последующим повторением описанных тактов.
Такой двигатель установлен на большинстве современной техники – автомобилях, тракторах и самоходных машинах, железнодорожных локомотивах, компрессорных и насосных блоках, других агрегатах.
Сравнивая двух- и четырехтактные двигатели внутреннего сгорания, важно учесть, что первые отличает большая компактность. Но эффективность двухтактных моделей меньше, по сравнению с четырехтактными, поэтому их применение ограничено
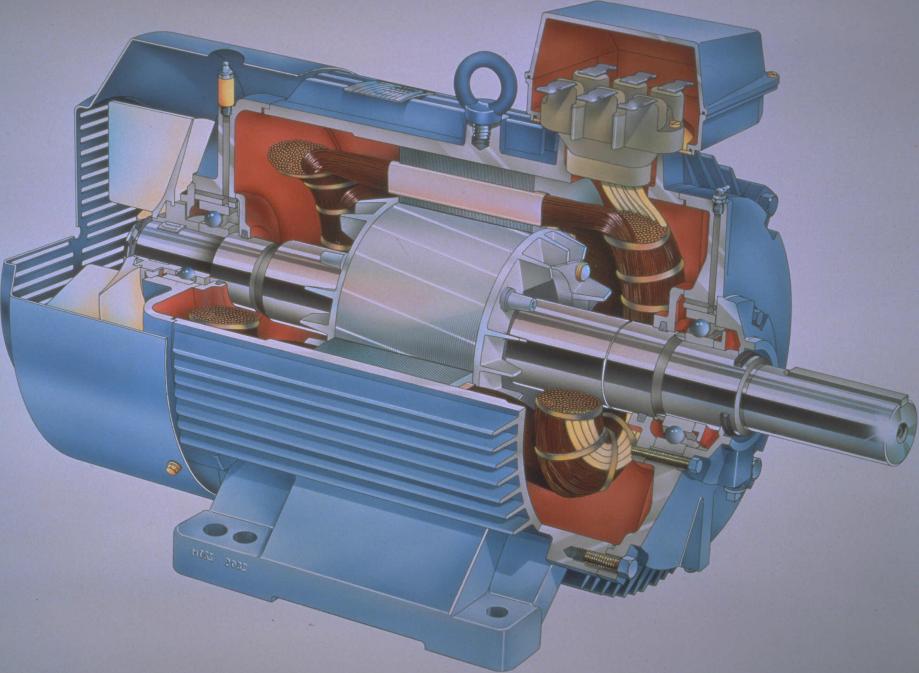
Статор асинхронного двигателя
Статор асинхронного двигателя представляет из себя сердечник, состоящий из пластин электротехнической стали и содержащий в себе медные обмотки, которые определенным образом уложены в пазах статора.
Как было упомянуто, сердечник статора состоит из пластин, которые изолированы друг от друга. С внутренней стороны статора есть пазы
в которые укладывается изоляция
Далее в эти пазы наматывается медный лакированный провод определенным образом, который представляет из себя обмотки статора
Асинхронный двигатель имеет три “куска” медного провода
Которые определенным образом уложены в пазы статора под углом в 120 градусов друг относительно друга.
Все 6 концов обмоточных проводов выведены в клеммную коробку, которая находится на корпусе двигателя.
Статор двигателя, а точнее, размеры сердечника, количество катушек в каждой обмотке и толщина моточного провода из которого намотаны катушки определяют основные параметры двигателя. Например, от числа катушек в каждой обмотке зависит номинальное число оборотов двигателя, а от толщины провода, которым они намотаны, зависит номинальная мощность двигателя. Количество обмоток для трехфазного асинхронного двигателя всегда равно трем. А вот количество катушек в каждой из этих обмоток разное. Катушки могут наматывать в один или два провода. Учитывая, что номинальное число оборотов двигателя обратно пропорционально номинальной нагрузке, можно смело сказать, что скорость вращения вала асинхронного двигателя будет уменьшаться при увеличении нагрузки. Если при работе двигателя начнут уменьшаться его обороты из-за роста нагрузки, то не остановка этого процесса может привести к полной остановке двигателя. Двигатель начнет сильно гудеть, вал ротора не будет крутиться – возникнет сильный нагрев катушек, с последующим разрушением изоляции моточного провода, что приведет к короткому замыканию и возгоранию обмоток.
Реальное фото статора одного из асинхронного двигателя выглядит вот так.
5.3. ПРИНЦИП ДЕЙСТВИЯ АСИНХРОННОГО ДВИГАТЕЛЯ
Вращающееся магнитное поле
статора пересекает проводники обмотки ротора и наводит в них ЭДС. Так как роторная
обмотка замкнута, то в проводниках ее возникают токи. Ток каждого проводника,
взаимодействуя с полем статора, создает электромагнитную силу — Fэм.
Совокупность сил всех проводников обмотки создает электромагнитный момент М,
который приводит ротор во вращение в направлении вращающего поля.
Частота вращения ротора
n2 будет всегда меньше синхронной частоты n1, т.е. ротор
всегда отстает от поля статора. Поясним это следующим образом. Пусть ротор вращается
с частотой n2 равной частоте вращающегося поля статора n1.
В этом случае поле не будет пересекать проводники роторной обмотки. Следовательно,
в них не будет наводиться ЭДС и не будет токов, а это значит, что вращающий
момент М = 0. Таким образом, ротор асинхронного двигателя принципиально не может
вращаться синхронно c полем статора. Разность между частотами поля статора n2
и ротора n1 называется частотой скольжения Dn.
.
Отношение частоты скольжения к частоте поля называется скольжением:
.*)
В общем случае скольжение в асинхронном двигателе может изменяться от нуля до единицы.
Однако номинальное скольжение Sн обычно составляет от 0,01 до 0,1 %. Преобразуя
выражение *), получим выражение частоты вращения ротора:
Обмотка ротора асинхронного
двигателя электрически не связана с обмоткой статора. В этом отношении двигатель
подобен трансформатору, в котором обмотка статора является первичной обмоткой,
а обмотка ротора — вторичной. Разница состоит в том, что ЭДС в обмотках трансформатора
наводится неизменяющимся во времени магнитным потоком, а ЭДС в обмотках двигателя
— потоком постоянным по величине, но вращающимся в пространстве. Эффект в том
и в другом случаях будет одинаковым. В отличие от вторичной обмотки трансформатора,
неподвижной, обмотка ротора двигателя вместе с ним вращается.
ЭДС роторной обмотки, в
свою очередь, зависит от частоты вращения ротора. В этом нетрудно убедиться,
анализируя процессы, протекающие в асинхронном двигателе.
Синхронная частота вращения
магнитного поля статора перемещается относительно ротора с частотой скольжения
Dn. Она же наводит в обмотке
ротора ЭДС E2, частота которой f2 связана со скольжением
S:
Учитывая, что f1=рn1/60,
f2=рn1S/60.
Приняв величину номинального скольжения порядка 0,01-0,1,
можно подсчитать частоту изменения ЭДС в роторной обмотке, которая составляет
0,5-5 Гц (при f1=50 Гц).
Что такое асинхронное обучение
Асинхронное обучение больше ориентировано на учащихся, поскольку позволяет им проходить курсы без ограничений, связанных с необходимостью находиться в определенном месте в определенное время. Пока у них есть доступ к интернету, асинхронные учащиеся могут свободно изучать материалы курса тогда, когда будет удобно именно им.
Хотя асинхронное обучение не происходит сразу же в какой-то конкретный момент времени, оно все же дает возможность для обратной связи. Учащиеся могут свободно делиться мыслями и вопросами с преподавателями и другими учениками, но стоит иметь в виду, что они могут и не получить немедленного ответа.
-
Обучающие рассылки
-
Блоги экспертов
-
Предварительно записанные видеоуроки или вебинары
-
Интернет-форумы и обсуждения
Аналогия с муфтой
Рассматривая принцип действия асинхронного электродвигателя, используемого в промышленных машинах, и его технические характеристики, нужно сказать про вращающуюся муфту механического сцепления . Крутящий момент на валу привода должен равняться крутящему моменту на ведомом валу. Кроме того, следует подчеркнуть, что эти два момента являются одним и тем же, поскольку крутящий момент линейного преобразователя вызывается трением между дисков внутри самой муфты.
 Электромагнитная муфта сцепления
Электромагнитная муфта сцепления
Похожий принцип действия и у тягового двигателя с фазным ротором. Система такого мотора состоит из восьми полюсов (из которых 4 – основные, а 4 – добавочные), и остовы. На основных полюсах расположены медные катушки. Вращение такого механизма обязано зубчатой передаче, которая получает крутящий момент от вала якоря, так же называемого сердечником. Включение в сеть, производится четырьмя гибкими кабелями. Основное назначение многополюсного электродвигателя – приведение в движение тяжелой техники: тепловозы, тракторы, комбайны и в некоторых случаях, станки.
Режимы работы
Механическая характеристика асинхронной машины: а — режим рекуперации энергии в сеть (генераторный режим), б — двигательный режим, в — режим противовключения (режим электромагнитного тормоза).
Двигательный режим
Если ротор неподвижен или частота его вращения меньше синхронной, то вращающееся магнитное поле пересекает проводники обмотки ротора и индуцирует в них ЭДС, под действием которой в обмотке ротора возникает ток. На проводники с током этой обмотки (а точнее, на зубцы сердечника ротора), действуют электромагнитные силы; их суммарное усилие образует электромагнитный вращающий момент, увлекающий ротор вслед за магнитным полем. Если этот момент достаточен для преодоления сил трения, ротор приходит во вращение, и его установившаяся частота вращения [об/мин] соответствует равенству электромагнитного момента тормозному, создаваемого нагрузкой на валу, силами трения в подшипниках, вентиляцией и т. д. Частота вращения ротора не может достигнуть частоты вращения магнитного поля, так как в этом случае угловая скорость вращения магнитного поля относительно обмотки ротора станет равной нулю, магнитное поле перестанет индуцировать в обмотке ротора ЭДС и, в свою очередь, создавать вращающий момент; таким образом, для двигательного режима работы асинхронной машины справедливо неравенство:
Относительная разность частот вращения магнитного поля и ротора называется скольжением
:
Очевидно, что при двигательном режиме .
Генераторный режим
Если ротор разогнать с помощью внешнего момента (например, каким-либо двигателем) до частоты, большей частоты вращения магнитного поля, то изменится направление ЭДС в обмотке ротора и активной составляющей тока ротора, то есть асинхронная машина перейдёт в генераторный режим
. При этом изменит направление и электромагнитный момент, который станет тормозным. В генераторном режиме работы скольжение .
Для работы асинхронной машины в генераторном режиме требуется источник реактивной мощности, создающий магнитное поле. При отсутствии первоначального магнитного поля в обмотке статора поток создают с помощью постоянных магнитов, либо при активной нагрузке за счёт остаточной индукции машины и конденсаторов, параллельно подключенных к фазам обмотки статора.
Асинхронный генератор потребляет реактивный ток и требует наличия в сети генераторов реактивной мощности в виде синхронных машин, синхронных компенсаторов , батарей статических конденсаторов (БСК). Из-за этого, несмотря на простоту обслуживания, асинхронный генератор применяют сравнительно редко, в основном в качестве ветрогенераторов малой мощности, вспомогательных источников небольшой мощности и тормозных устройств. Зато генераторный режим асинхронного двигателя используется довольно часто. В таком режиме работают двигатели эскалаторов метро, которые едут вниз. В генераторном режиме работают двигатели лифтов, в зависимости от соотношения веса в кабине и в противовесе.
Режим холостого хода
Режим холостого хода асинхронного двигателя возникает при отсутствии на валу нагрузки в виде редуктора и рабочего органа. Из опыта холостого хода могут быть определены значения намагничивающего тока и мощности потерь в магнитопроводе, в подшипниках, в вентиляторе. В режиме реального холостого хода s
=0,01-0,08. В режиме идеального холостого хода n
2 =n
1 , следовательно s
=0 (на самом деле этот режим недостижим, даже при допущении, что трение в подшипниках не создаёт свой момент нагрузки — сам принцип работы двигателя подразумевает отставание ротора от поля статора для создания поля ротора. При s
=0 поле статора не пересекает обмотки ротора и не может индуцировать в нём ток, а значит не создаётся магнитное поле ротора.)
Режим электромагнитного тормоза (противовключение)
Если изменить направление вращения ротора или магнитного поля так, чтобы они вращались в противоположных направлениях, то ЭДС и активная составляющая тока в обмотке ротора будут направлены так же, как в двигательном режиме, и машина будет потреблять из сети активную мощность. Однако электромагнитный момент будет направлен встречно моменту нагрузки, являясь тормозящим. Для режима справедливы неравенства:
Этот режим применяют кратковременно, так как при нём в роторе выделяется много тепла, которое двигатель не способен рассеять, что может вывести его из строя.
Для более мягкого торможения может применяться генераторный режим, но он эффективен только при оборотах, близких к номинальным.
Трехфазный асинхронный двигатель с фазным ротором
До широкого распространения частотных преобразователей асинхронные двигатели средней и большой мощности делали с фазным ротором. Трехфазные асинхронные двигатели с фазным ротором (АДФР) обычно применяли в устройствах с тяжелыми условиями пуска, например в качестве крановых двигателей переменного тока, или же для привода устройств, требующих плавного регулирования частоты вращения.
Конструкция АДФР
Фазный ротор
Конструктивно фазный ротор представляет из себя трехфазную обмотку (аналогичную обмотки статора) уложенную в пазы сердечника фазного ротора. Концы фаз такой обмотки ротора обычно соединяются в «звезду», а начала подключают к контактным кольцам, изолированным друг от друга и от вала. Через щетки к контактным кольцам обычно присоединяется трехфазный пусковой или регулировочный реостат. Асинхронные двигатели с фазным ротором имеют более сложную конструкцию, чем у двигателей с короткозамкнутым ротором, однако обладают лучшими пусковыми и регулировочными свойствами.
Фазный ротор
Статор АДФР
Статор асинхронного двигателя с фазным ротором по конструкции не отличается от статора асинхронного двигателя с короткозамкнутым ротором.
Обозначение выводов вторичных обмоток трехфазного АДФР
Обозначение выводов обмоток ротора вновь разрабатываемых трехфазных машин согласно ГОСТ 26772-85
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | K1 | K2 |
| вторая фаза | L1 | L2 |
| третья фаза | M1 | M2 |
| Соединение в звезду (число выводов 3 или 4) | ||
| первая фаза | K | |
| вторая фаза | L | |
| третья фаза | M | |
| точка звезды (нулевая точка) | Q | |
| Соединение в треугольник (число выводов 3) | ||
| первый вывод | K | |
| второй вывод | L | |
| третий вывод | M |
Обозначение выводов обмоток ротора ранее разработанных и модернизируемых трехфазных машин согласно ГОСТ 26772-85
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода |
|---|---|
| Соединение звездой (число выводов 3 или 4) | |
| первая фаза | Р1 |
| вторая фаза | Р2 |
| третья фаза | Р3 |
| нулевая точка | |
| Соединение треугольником (число выводов 3) | |
| первый вывод | Р1 |
| второй вывод | Р2 |
| третий вывод | Р3 |
Примечание: Контактные кольца роторов асинхронных двигателей обозначают так же, как присоединенные к ним выводы обмотки ротора, при этом расположение колец должно быть в порядке цифр, указанных в таблице, а кольцо 1 должно быть наиболее удаленным от обмотки ротора. Обозначение самих колец буквами необязательно.
Пуск АДФР
Пуск двигателей с фазным ротором производится с помощью пускового реостата в цепи ротора.
Применяются проволочные и жидкостные реостаты.
Металлические реостаты являются ступенчатыми, и переключение с одной ступени на другую осуществляется либо вручную с помощью рукоятки контроллера, существенным элементом которого является вал с укрепленными на нем контактами, либо же автоматически с помощью контакторов или контроллера с электрическим приводом.
Жидкостный реостат представляет собой сосуд с электролитом, в котором опущены электроды. Сопротивление реостата регулируется путем изменения глубины погружения электродов .
Для повышения КПД и снижения износа щеток некоторые АДФР содержат специальное устройство (короткозамкнутый механизм), которое после запуска поднимает щетки и замыкает кольца.
При реостатном пуске достигаются благоприятные пусковые характеристики, так как высокие значения моментов достигаются при невысоких значениях пусковых токов. В настоящее время АДФР заменяются комбинацией асинхронного электродвигателя с короткозамкнутым ротором и частотным преобразователем.
ГОСТ 27471-87 Машины электрические вращающиеся. Термины и определения.
ГОСТ 26772-85 Машины электрические вращающиеся. Обозначение выводов и направление вращения.
А.И.Вольдек. Электрические машины. Учебник для студентов высш. техн. заведений. изд. 2-е, перераб. и доп.-Ленинград: Энергия, 1974.